 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|

 |
|

 |
|
 |
|
 |
|
 |
|
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(һ)
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(��)
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(��)
2 ��ܗ����Ĕ��ֻ������о�
2.1 ����
��ܗ����Ĕ��ֻ����������c�������ڒ��_���y��ܗ�������Փ�ķ��i�ƌ��c׃�Q���H���ù�ܗ�l���Ę����Pϵ�����Ô�ֵ������������Ӌ��C���ɽ�Q��ܗ������Փ�еĸ��N���}���҆��}�ľS�����ͣ��㷨���Σ����ܽ┵��ĸ���憖�}������̎������ĸ�������↖�}�����F���������x�ϵĹ�ܗ����Ĕ��ֻ��������������Ĕ��ֻ������ֻ��ķ�������^�̡�
���y�Ĺ�ܗ������ⷽ���ǻ��ڽ������_ʽ��������֪���棬ͨ�^�˹��ƌ����õ���ܗ����Ľ������̻�[78-83]������֪������һϵ���xɢ�����c�������r���@�N�����͟o���m�ã�Ҳ�����f�����m�÷����кܴ�����ԡ���һ���棬��鹲ܗ��������漰�����Ĺ�ʽ�ƌ��ʹ����Ĕ��WӋ�㣬��һ��Ĺ��̼��g�ˆT���f�������@һ����Փ��Ӌ�㷽����һ���y�ȣ������˹�Ӌ�㣬��һ��Ĺ��̼��g�ˆT���f���Ɠ��@һ����Փ��Ӌ�㷽����һ���y�ȣ������˹�Ӌ������׳��e�����Թ�ܗ����Ӌ��C�����б�Ҫ�ġ���������Ӌ��C��⌍�F���棬���ڽ�������ʽ�����ƌ�Ӌ��Ķ��ӻ������y�Ĺ�ܗ��ⷽ��Ҳ���y����ͨ�����^����Ӌ��C�㷨��
����ּ��ͻ���@һ���ޣ�һ����ʹ��ܗ�����������֪����锵�ֻ��������r����Ȼ�܉��ã����،���ܗ������m�÷�������һ���棬���ӹ�ܗ���������Ԅӻ��̶ȣ�ʹ�Ïĵõ���֪���攵���c���\�Ӆ�����������ܗ�����@һ�^�̶�������Ӌ��C�Ԅ���ɣ��Ñ�ֻ�ø�׃ݔ�녢���Ϳ��Է���صõ����N��ܗ���档
2.2 ���ֻ���ܗ��������P���c���ԭ���ڹ���
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(��)�oՓ�ǔ������棬߀�ǽ������棬�ڌ����M�й�ܗ��Փ���о��У���ܗ�Pϵ�c��ܗ�l�����о��Ļ��A����Ҫ������
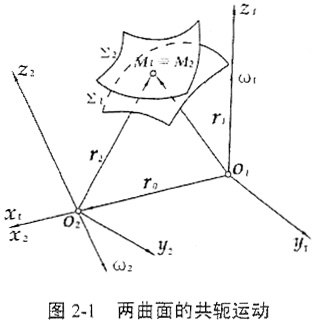
��D2-1��1����2��ɹ�ܗ���������棬���Ц�1�O��ĸ��ǰ��S1��o1x1y1z1����S2��o2x2y2z2����ɂ��քe�c��1����2����B������ϵ��r1(1)��r2(2)�քe��ʾ��1����2��һ�c��λ��ʸ��N1(1)��N2(2)�քe��ʾ����1����2��r1(1)��r2(2)���c̎�Ć�λ��ʸ��������̖���Ϙ˱�ʾ�����x�����ˣ��˱�ʾ���ٵ����档
�Oĸ���榲1������ϵS1�пɱ�ʾ����u��v�酢���ķ���
r1(1)=r1(1)(u��v) (2-1)
�t���榲1����t�酢����Ҏ��׃�����ڿ��g�γ�һ�����壬ԓ������ķ��̄t��
{��1}��r1(1)=r1(1)(u,v,t) (2-2)
u,v��ĸ����Ď΅�����t��ĸ�����׃����������ĸ��o�Π�׃���r��t�t���\�Ӆ����������е�t���������g���\�Ӆ�����
������һ���榲2�c������{��1}����һ�����Ц�1����һ�l������L���cM��Ҳ�Q���|������|�c�����ڹ�����ÿһ���cM�Ϧ�2�c��1���й���������������榲2����������{��1}�İ��j��������2�c��1���鹲ܗ���棬�@�N���|�F��t�Q�鹲ܗ���|��B��ܗ���ӡ�
���榲1�c��2�������F��ܗ���|�\�ӣ��������횝M�����»����l����
��1�����榲1����2���������Ľ��|�c����ܗ�c��M1��M2����غϞ�һ�c����D2-1������
r2=r1-r0 (2-3)
���ھ��w���H���}��ʽ��2-3���t�ȃr��r1(2)=r2(2)(u��v��t)��
(2)�������ڽ��|���У����ڽ��|̎�й��������҃����摪�������һ�Ƚ��|����
N1=-N2 (2-4)
��3���������ڽ��|̎�������ٶ�v12��λ��ԓ̎�Ĺ�����ȣ��Ա��C�B�m���|�������°l��Ƕ�����x��B����
N��v12=0
�� (r,u��r,v)��r,t=0 (2-5)
ͨ���Q��2-5��ʽ�鹲ܗ�l�꣨����j�l������
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(��)�ɣ�2-3������2-5����ʽ����⣬�������ĸ���榲1�Ĺ�ܗ���馲2���༴�ɹ�ܗ�l����2-5������\�Ӆ���t�cĸ����Ď΅�����u,v��֮�g���Pϵ��t=t(u,v),Ȼ����루2-3��ʽ�����ɵõ���ܗ���榲2��r2(2)=r2(2)(u��v)��
��Ȼ������ĸ����锵�����棬���F�㷨�ஔ���s�����^����Փ�ǔ������棬߀�ǽ������棬����K�õ��Ĺ�ܗ��������xɢ�Ĕ������档
2.2.2 ���ֻ���ܗ��������c���ԭ��
���ڽ�������Ĺ�ܗ������Փ���o���ǹ�ܗ��������ܗ���|�����ľ��_��Ч�Ĺ��ߡ����ǣ��@����Փ����������ȱ�ݣ�һ�������׃�͎�׃�Q���s��Ӌ�㹤������ʹ��Ӌ��C����Ӌ��̈́ӑB�����OӋ���ஔ�y�ȣ����nj��ڷǽ�����ʽ���xɢ���������棬���y�Ļ��ڽ�����Փ�Ĺ�ܗ����ԭ���c���������t�o�ܞ��������ڴˣ������ܗ����Ĕ��ֻ��������Խ�Q�F�������OӋ�����ּӹ����N���ַ����еĆ��}��
���ڔ�������������Փ�c�����ǹ�ܗ����Ĕ��ֻ������ĺ��ă��ݣ����Ļ���˼���ǏĔ��ֻ��xɢ������l�����Ô�ֵ�����ֶΌ���������քe�ز�ͬ�ķ���u��v����һ�����w�Ͼ��ж��A�B�m���������Θӗl��ֵ�������������p�΅���������һ�c�����|��ӑՓ�˻����P�ھ��ІΎ΅����ăɗl�������c�����|���о��������������\���^���еĹ�ܗ�Pϵ�͗l����������OСֵ�Ĕ���Ҏ��ģ�ͣ����Ã����㷨���������c����ĸ���榲1�ܗ�Ĕ������榲2��
2.3 ��ܗ�����Ĕ��ֻ����
���ֻ����湲ܗ������Ѓɂ��P�I��������ܗ����������N��������v12�����������@�@�ɂ��I��չ�_ӑՓ��
���ֻ������ϵ��c���xɢ�ģ��҂����Ը����\�Ӆ����քe����������ÿһ���c�\�����ԣ����ÿһ���c���\���^���Ќ����Ĺ�ܗ�c��λ�ã�����е�Ԓ������ô�����еĹ�ܗ�c���������Ҳ����Ȼ��Ȼ����������֪���ֻ����挦���Ĺ�ܗ���棬�@���ǔ��ֻ���ܗ�����������w˼·��
���ڹ�ܗ��������^���У��������c����ӄӲ������ṩ��������ȫ���l��������������ԓ�c�ķ�����N���ڿ��������φ��c���\������֮ǰ���б�Ҫ�����������M�������ֵ�������g�ӵõ�һ���B�m�����棬�Ķ��@ȡ����֪�����ijЩ���w���ԡ�ᘌ�������N����⣬��������������ֱ�Ľ��S��ֵ���������ڝM�㹲ܗ����Ҫ���ṩ��֪������һ�c�ķ�����N����ͬ�r�����p�ٲ�ֵ��Ӌ������
���˷�����N�⣬��ܗ��������е���һ����ܗ������������һ�c���\��܉�E��������v12����������������S���M�c������Č����Pϵ�����������v12����ⷽ����
2.3.1 ������N�����
��ܗ����Ĕ��ֻ���������ܗ�����X�S�������о�(��)
�����ֵ���R����Ҫ���}��Ӌ�������������������֪�����������乲ܗ����Ľ��S��ֵ��������������ֵ��������ֵ��
���S��ֱ�����Ǐ���֪�Ĕ��ֻ��xɢ������l������������քe����ͬ�ķ���u,v����һ�����w�Ͼ��ж��A�B�m���������Θӗl��ֱ�������ɗl����IJ�ֱ�Ⱦ��ڽ����c���������������e�����ǔ��ֻ��������@һ�c�ķ�����N����D2-25��ʾ���������Θӗl��ֵ��Ψһ�ԣ���������ֵ����õķ���������ȵġ�Ȼ�������������\���^�̵Ĺ�ܗ�l�����������OСֵ���WҎ��ģ�ͣ����Ã����㷨����������c��֪�������榲1���ܗ�Ĕ��ֻ����榲2��
�@�ӣ��͌������p�΅�������һ�c�����|��ӑՓ�D�����P�ھ��ІΎ΅����ăɗl�������c�����|���о����Ķ�������Ӌ��ď��s�̶ȡ�
��u���������B���Θӗl��ֵ��
����u�����n+1�������c��ui��fi������i=0��1����,n����������Θӗl��ֵ����S��x���M�����Зl����
��1��S��ui)=fi,i=0,1,��,n��
��2����ÿһ��С�^�g[ui,ui+1]�������ζ��ʽ��
��3��S(ui)��C2[a,b],[a,b]��������ֵ�^�g������ֵ���������^�g���B�m�Ķ��A������
��ֵ���ʽ���þ��Է��̽M��ʾ��
(1-��i)Mi-1+2Mi+��iMi+1=6f[ui-1,ui,ui=1],i=1,2,��,n-1�� ��2-6��
ʽ�У�![]() ��ʾS��x���Ķ��A������ui��ֵ��
��ʾS��x���Ķ��A������ui��ֵ��![]() ��ʾ���A���̡��@���P��
��ʾ���A���̡��@���P��![]() �ľ����h�̽M������n-1�����̣���δ֪��������n+1��2��һ����ø���߅��l���o������Ķ������̣��@�Ӿ���Ψһ�ش_����
�ľ����h�̽M������n-1�����̣���δ֪��������n+1��2��һ����ø���߅��l���o������Ķ������̣��@�Ӿ���Ψһ�ش_����
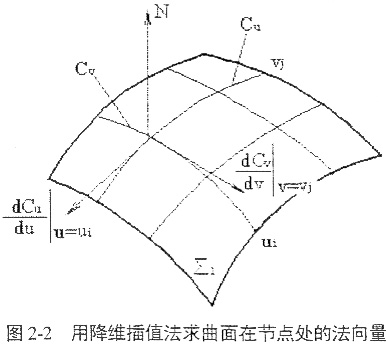
�����o������֪�����ϵĹ��c����ֵ���քe��u=ui��v=vj�����P�ڎ΅���u,v�����Θӗl�庯����![]() ���t�������c(ui,vj)̎�ķ�������
���t�������c(ui,vj)̎�ķ�������

�@�ӣ��ý��S��ֵ���Ϳ��������������һ���c��ui,vj��̎�ķ������������Ã�������\���Pϵ��ͨ�^����׃�Q���Ϳ���������\���^���Ќ�������t�������У�ui,vj���ķ�������
2.3.2 �����\���ٶ�v12�����
�S���\�Ӕ�t��׃������֪���榲1��δ֪���榲2������ϵS2�е��\��܉�E�γ�������{��1}����{��1}ͨ�^����׃�Q�����ɵõ���1��S2�Ќ�����ÿһ��t��λ�����ˣ����@Щλ��ӛ����͵õ��˦�1��S2���\�Ӷ��γɵ������塣
����֪���榲1��һϵ���xɢ������ֵ��ʾ���tҎ�t���������ֵϵ�п��Ԍ��ɶ��S���M�ɵ���ʽ�����S���M�еĸ��S�քe����u,v��׃�������S���M�еĸ�Ԫ�طքe���������Ϲ��c�����ˣ���ô�����榲1������S2���\���γɵ�������{��1}���������S���M��ʾ�����S���M�ĸ��S�քe����u,v,t��׃���������������еĸ��c�c�����S���M�ĸ���Ԫ���ڿ��g�Y�����ǡ��������ģ���D2-3��ʾ��

�O�����S���M��M���tȡt��tk�r��M�˻���һ�����S���M������ʾ������{��1}�Ќ���t=tk�����棻���������֪������һ�c��ui��vj��,��ȡu��ui,v��vj���tM�˻���һ�S���M������ʾ����һ�c��ui��vj��������ϵS2�Ќ������\�Ӆ���t��һϵ��λ��������Ҳ���c��ui��vj��������ϵS2�е��xɢ�\��܉�E��
�@�ӣ�ȡ���c��ui��vj�����xɢ�\��܉�E���������Θӗl������ֱ���Ϳ��Եõ���t����׃�����B�m����Ct(t)������ʾ�c���B�m�\��܉�E��Ȼ����ȡCt(t)���\�Ӆ���t�Č��������Ϳ��Եó��c��ui,vj���\��܉�E��������������
��ôt=tk�r�c��ui,vj���\��܉�E����������
![]()
�@Ҳ�������榲1��һ�c(ui��vj)��t=tk�r���������榲2���\���ٶȡ�
2.4 ���ֻ���ܗ�������ģ���c�㷨
2.4.1 ���Wģ��
��������Փ�������湲ܗ�l�����P�I������ⷽ�����������µĹ�ܗ������┵�Wģ��

ʽ��
r1(2)(u,v,t)������֪���榲1������ϵS2���γɵ������壻
N(u,v,t)����������ϵS2�У������\�Ӆ���t����֪���榲1���c��u,v���ķ�������
v12(u,v,t)����������ϵS2�У������\�Ӆ���t�Ħ�1���c��u,v���������\���ٶȡ�
2.4.2 �㷨���F
��1���o��uiֵ��
��2���o��vjֵ��
��3����ǰ������������榲1���c(ui��vj)�ķ�����N(ui��vj)��
��4��������׃�Q���N(ui��vj)��������t���е�������ϵS2�е�һϵ��ֵN(ui��vj,t)��
��5����ǰ���B�ķ�������c��ui��vj��������ϵS2�У���������t���е������\���ٶ�v12(ui��vj,t)��
��6��ȡ��(ui,vj,t)=N(ui,vj,t)��v12(ui,vj,t),�õ�����������t���е�һϵ��ֵ���ڴ˻��A�ϣ��ò�ֵ�ķ����õ�һ����t����׃�����B�m������(t),Ȼ�����ʹ��(t)=0�rt��ֵtk��
��7����u=ui,v=vj,t=tk���루2-9���е�һʽ���͵õ���֪������1���c��ui,vj���������Ĺ�ܗ���榲2�ϵĹ�ܗ�cr2(ui,vj)�����@����ܗ�c������ֵ���棻
��8��vj��vj+��v,�D����2����ֱ��v����Ӌ���ꮅ��
��9��ui��ui+��u,�D����1����ֱ��u����Ӌ���ꮅ��
ͨ�^����Ӌ�㣬�͵õ��ˌ�������֪���榲1�Ϲ��c��һϵ�й�ܗ�c�������@Щ�xɢ�Ĺ�ܗ�c�ͱ��_����Ҫ��Ĺ�ܗ���榲2��
��Ӌ���У�����c��ui,vj��������t���\���^���ж��]��ʹ��(t)=0,�t���Д���c�]�Ѕ��c��ܗ���ڹ�ܗ������������ԓ�c������c��ui,vj��d������t���\���^���г��^һ��ʹ��(t)=0���t���Д���c�������\���^���в�ֻһ�΅��c�˹�ܗ���@�N��֪�c������ܗ�c��һ���ࡱ��ӳ������³����Д���Ɂy���@�N��r����ʹt�Ԅӷֶκ��f�w�{�ù�ܗ��⺯���ķ�����̎����ֱ����ÿһ��t�ķֶ��У�ԓ�c��ui,vj�����c��ܗ�ĴΔ������^һ�Ρ�
2.5 С�Y
��������˔��ֻ���ܗ����ĸ����c���ԭ������B�˔�ֵ����ܗ����Ѓ���������P���|����ܗ�Pϵ�c��ܗ�l������Q�˔��ֻ����湲ܗ����У���ܗ����������N��������v12�Ĕ��ֻ���↖�}�������˔��ֻ���ܗ���ģ�ͺ��㷨��
��վ֩���ģ�壺 �ٸ�̫ˬ�����߹ۿ������Ƶ| av��������Ļ����ɫ| ����AV��������������һ��| �Ļ�Ӱ���������߾�Ʒ| ���������һ��������������| �þ���ҹ�������| ��ɫav����þ�һ����������| ��Ʒ�ۺϾþþþþ�97����| ������Ʒ����������߹ۿ�| ����av����һ������������j| 97ҹҹ������ˬ����ģ���˺�| �����������ҹ��Ƶ| aaa��ҹ���ػ��ձ���Ƭ| �þ������ۺ���������HD��Ů| ��Ū�ŵ������ٸ�ϵ����Ƶ| ����ŷ����������һ������ | �鶹��Ʒһ����������| �������� ר�� ŷ�� �Ʒ�| ��Ʒ�þþþþ��������| ������Ʒ��ѹۿ�������| �ִ��ֻ���Ӳ��ˬ�������Ƶ| ŷ�������ӽ�����| �����ٸ���Ʒ����ϵ��| �պ�������Ļ����һ��| ������Ƶ���˴�ý| ���˳�ɫ�ۺ���ҹҹ�þ�| ����AV�������뾫Ʒ��ϼ��ӰӰԺ| �й������������츾žž���� | ���������ۺ�������Ƶ| ����Ժ�������������Ƶ�µ�| ���뱬�黤ʿ����ˬ| �պ���Ʒ����һ����������| �þþ�Ʒ��������ҹɫAV��վ | �Ļ�������Ʒ������������| ����Ʒ���Ҿþþþþ�| ŷ����Ʒ�պ���Ʒһ��| ����������Ļ�պ���Ʒ| �þþ�Ʒ����������ˬ��Ӱ����| �ݺ�ɫ�ݺ�ɫ�ۺ����� | ������Ů�ۺ�ɫһ����������| �þù���������������ƮƮ��|